Electric Vehicle
April 2016
with Nathan Kau
For the 2016 Science Olympiad Competition, we built a small, battery-powered electric vehicle to get to and stop at a target point as quickly and accurately as possible.
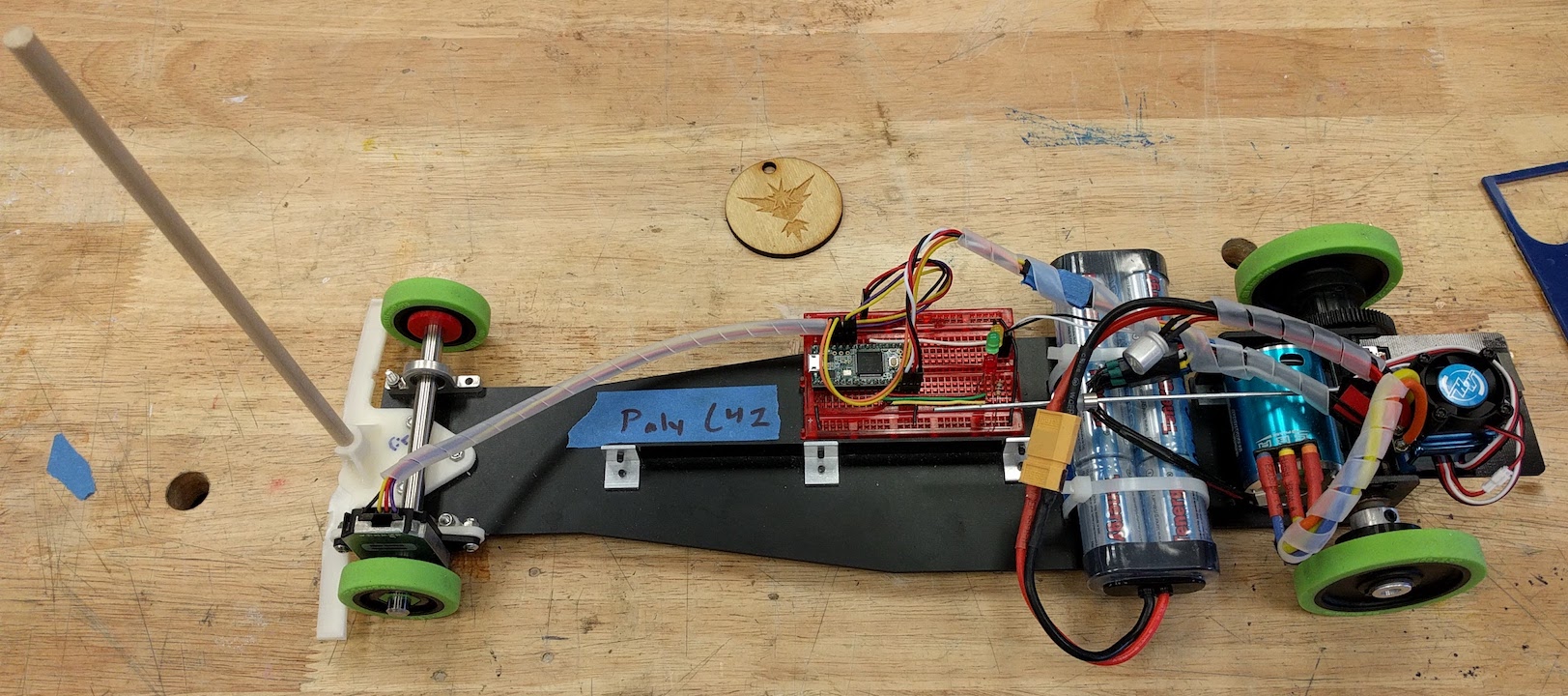
The car utilizes a high-power Brushless DC (BLDC) motor to accelerate rapidly, with feedback from 2 encoders and a PID control algorithm to smoothly decelerate and stop at the target point. We compared the distances measured by the front axle encoder and motor-integrated encoder to determine how much slippage occurred on the rear wheels.
The chassis was attained from an RC car kit, but we replaced the control electronics with a Teensy 3.2 microcontroller running custom code to sense position and velocity based on the encoder measurements, and generate suitable PWM signals to drive the motor’s Electronic Speed Controller (ESC).
Awards:
- 1st place at 2016 Santa Clara Regional Competition
- 1st place at 2016 NorCal State Competition
comments powered by Disqus